
Новости
Научная деятельность ООО "МКОД"
Целью проекта являлась разработка ключевых компонентов и систем базы автоматического обслуживания БЛА, оснащенной оптико-электронной системой точного автоматического привода на посадку, в том числе в условиях движения и качки.
Новости
деятельность
Целью проекта являлась разработка ключевых компонентов и систем базы автоматического обслуживания БЛА, оснащенной оптико-электронной системой точного автоматического привода на посадку, в том числе в условиях движения и качки.
На данный момент не решена полностью задача автоматизации данных задач и минимизация необходимости участия человека в процессе управления БЛА. Будучи оснащенными спутниковыми навигационными системами GPS и ГЛОНАСС, упомянутые летательные аппараты имеют возможность автоматически поддерживать заданную высоту полета, удерживаться в точке координат и проходить заданный маршрут, однако, наиболее ответственные процедуры взлета и посадки требуют управления процессом со стороны оператора, что не позволяет целиком автоматизировать полетное задание.
Для позиционирования и отслеживания скорости БЛА мультироторного или вертолетного типа с высокой точностью и управления ими с высокой скоростью требуется с соответствующей точностью оценивать координаты и скорость БЛА. Данные характеристики недостижимы для спутниковых систем позиционирования. Так же следует отметить, что при изменении высоты при наличии препятствий для прохождения радиосигналов, GPS работает неустойчиво с одной стороны, а с другой — темп обновления данных GPS не более 20 измерений в секунду, что мало для аппарата с динамикой даже в 1-2g.
Обязательным условием разрабатываемой системы являлось использование исключительно оптического диапазона, т.к. с одной стороны во всех разрешенных радиодиапазонах уже располагаются техногенные помехи от источников радиосигналов, а с другой стороны полезная нагрузка БЛА сама по себе может являться мощнейшим источником радиоизлучения в разрешенных радиодиапазонах, к примеру в случае передачи видео в высоком качестве по популярному радиоканалу LightBridge, который занимает полностью весь свободный разрешенный спектр в диапазоне 2.4 ГГц.
В рамках Проекта были разработаны и протестированы ключевые узлы базы автоматического обслуживания:
- Стабилизирующая посадочная платформа, поддерживающая горизонтальное положение, оБЛАдающая устойчивостью к колебаниям и изменению угла наклона — для размещения наземной части курсоглиссадной системы и посадочной площадки;
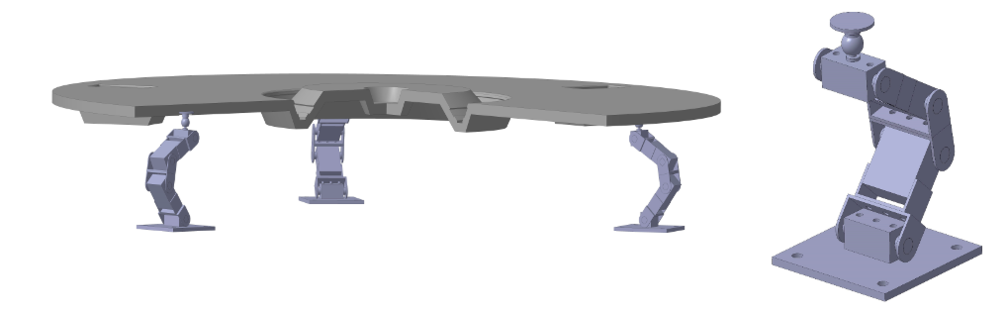
Разработанная схема посадочной платформы с опорами
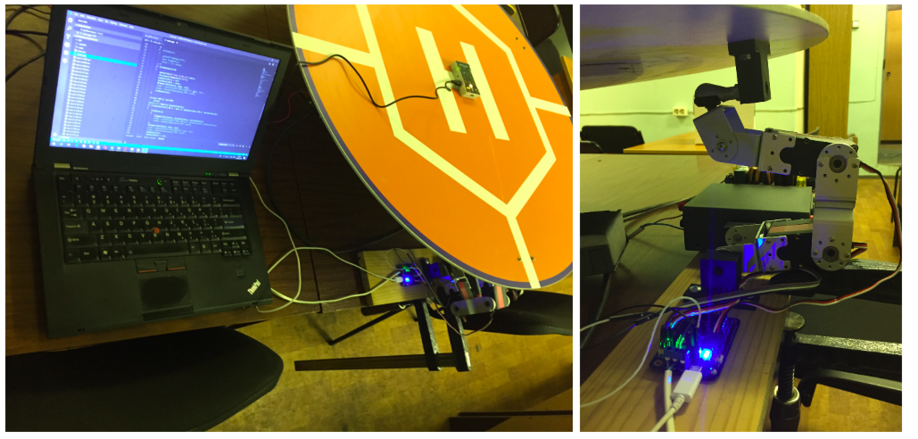
Платформа в процессе испытаний
Оптоэлектронная система управления автоматической точной посадкой автономных БЛА. Эта система базируется на инновационных методах управления БЛА по виртуальным ориентирам и не зависит от сигнала GPS.
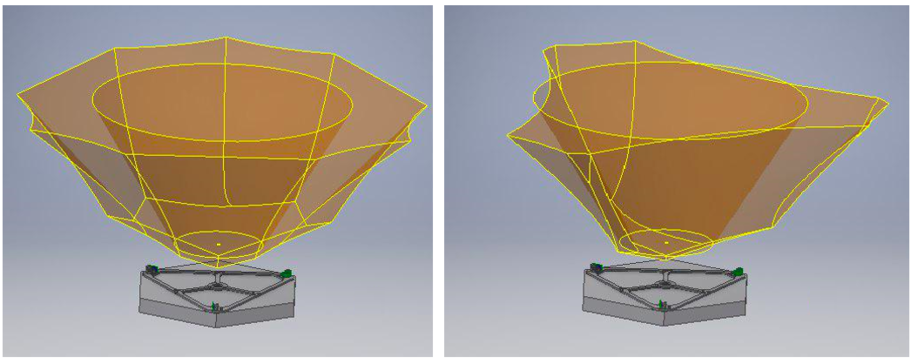
Разработанная оптико-электронная система посадки. Зона покрытия. Угол раскрытия створа сканирования маяка — 100 градусов, угловая ширина линии — 90 градусов

Разработанная оптико-электронная система посадки перед испытаниями
Продуктом проекта является комплекс, состоящий из контейнера с отсеками под системы обслуживания, подзарядки и хранения, стабилизированною платформу и оптико-электронную курсоглиссадную систему. Наземная часть курсоглиссадной системы и посадочная площадка располагаются на стабилизирующей платформе, поддерживающей горизонтальное положение.
В результате выполнения Проекта отработаны решения для основных узлов и элементов базы автоматического обслуживания, а также создан и протестирован опытный образец базы автоматического обслуживания БЛА с оптико-электронной системой управления точной посадки.

3D-модель базы автоматического обслуживания БЛА
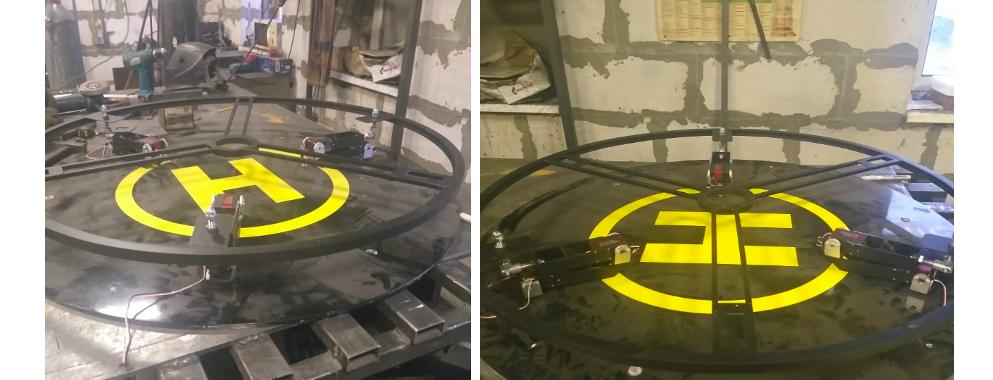


Изготовление опытного образца базы автоматического обслуживания БЛА

Разработанная база автоматического обслуживания БЛА на выставке
«Баркемп «Национальная технологическая революция 20.35»
Подписанты соглашения, в число которых вошли ФГБОУ ВО «ТГУ имени Г.Р. Державина», ООО «Современные технологии машиностроения», ООО «Съемка с воздуха», ООО «Вершина», ООО «Север», ИП «Уккуев Эмир Казбекович» и ООО «ИТ-Меридиан» определили для себя следующие цели:
– разработка, утверждение и последующая реализация на основании научно-технических заделов, интеллектуального, производственного и коммерческого потенциала, комплексной научно-технической программы по созданию, внедрению и коммерциализации на российском и мировом рынке комплекса технологий с применением БАС;
– взаимовыгодное привлечение различных ресурсов и эффективное использование существующих и вновь формируемых механизмов поддержки;
– эффективное использование и развитие имеющейся учебной, научно-лабораторной и научно-производственной базы Сторон.
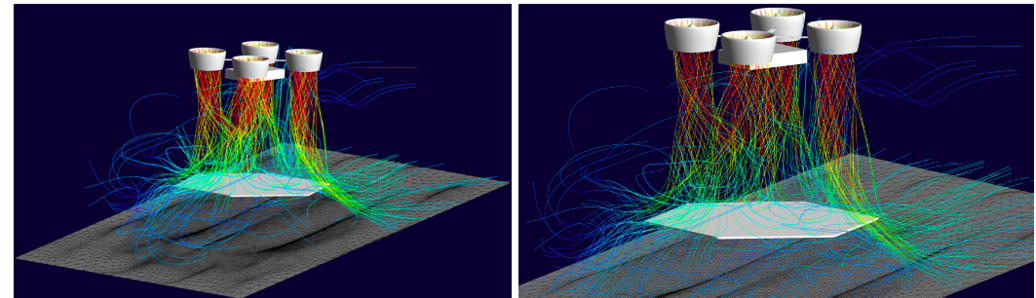
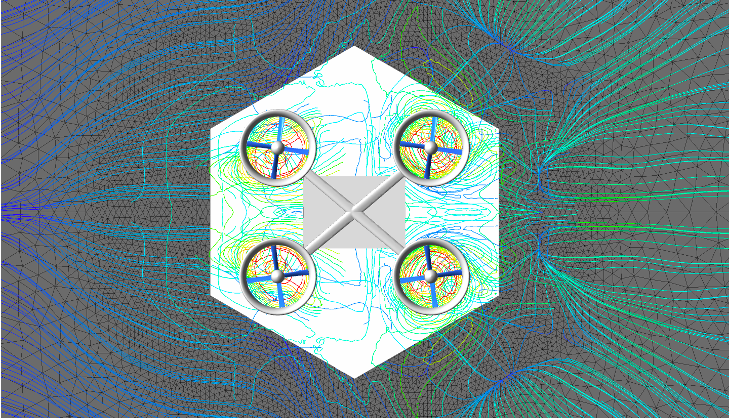
Визуализация расчетов натекающего воздушного потока, создаваемого БЛА при посадке на платформу
Сейчас перед компанией ООО «МКОД» стоит задача устранения недостатка, выявленного в процессе испытаний опытного образца базы автоматического обслуживания - рассогласованность действий стабилизирующей платформы и БЛА в процессе посадки на движущийся объект.
Хотя по отдельности системы стабилизации и точной посадки работают точно, запаздывания в реакции каждой из них не позволяют выполнять точную посадку при сильном ветре или движении по дороге со значительными неровностями, что сильно ограничивает возможности мобильного использования базы.
Следующим шагом является создание комбинированной системы точной посадки с дублированием каналов управления БЛА. За счет использования быстродействующих каналов связи и значительной вычислительной мощности посадочная платформа может обеспечивать прямое управление полетом БЛА на конечном участке траектории посадки, согласованное с действиями стабилизирующей системы. Комбинирование данных геолокации, координат БЛА в оБЛАсти действия оптико-электронной системы посадки, погодных датчиков, системы технического зрения, акселерометров и гироскопов как платформы, так и БЛА в единой предиктивной модели позволит с высокой надежностью обеспечивать посадку на объекты, движущиеся на скоростях вплоть до 40 км/ч, полностью без участия оператора.
Этот проект представлен для участия в конкурсном отборе проектов, проводимом Фондом содействия развитию малых форм предприятий в научно-технической сфере (Фонд содействия инновациям) «Развитие-НТИ-2020».
НИОКР выполняется в рамках комплексного интегрированного проекта (КИП-4) "Оператор", который был защищен на проектном комитете 15.05.2020 и предусматривает создание элементов наземной инфраструктуры применения БАС, а конкретно - мобильной системы базирования, подзарядки и обслуживания БЛА.
ОСТАЛИСЬ ВОПРОСЫ?
ОСТАЛИСЬ ВОПРОСЫ?
Получите бесплатную консультацию нашего специалиста
Получите бесплатную консультацию нашего специалиста
E-mail:
info@mcode-spb.ru
E-mail:
info@mcode-spb.ru

Адрес:
192102, г. Санкт-Петербург,
ул. Салова, д. 53/1
Адрес:
192102, г. Санкт-Петербург, ул. Салова, д. 53/1
Телефон:
8 (812) 922 84 17
Телефон:
8 (812) 922 84 17